Đây là hai phần đầu tiên mà học viên của chương trình sẽ học được,bao gồm hai mảng à cơ học và lập trình
I.Phần cơ học
Như các bạn biết,bánh xe,một phát minh của 1 nhà phát minh vô danh nhưng vĩ đại nhất của loài người đã thay đổi lịch sử của nhân loại. Khoảng cách giữa các nơi trên quả địa cầu ngày càng được giải quyết một cách đơn giản,bánh xe trên các phương tiện giao thông đường bộ hay cánh quạt trên máy bay đóng vai trò chủ chốt khiến chúng hoạt động. Thế nhưng,trên 1 chiếc xe hau thì không thể chỉ có bánh xe hay cánh quạt máy bay mới đóng vai trò chính quyết định cho sự hoạt động mà ít người biết rằng,có 1 nhân vật còn quan trọng hơn,đó chính là hệ truyền động.
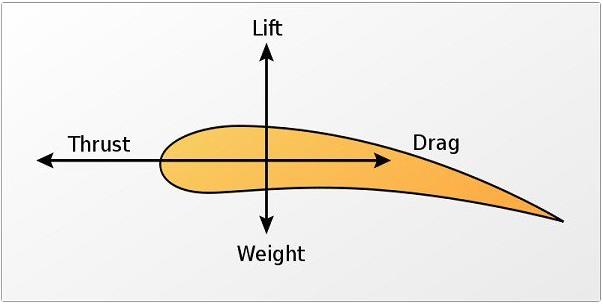
Bánh xe tiếp xúc với mặt đường,xe chạy đi nhờ vào lực ma sát và tác dụng của trọng lực lên xe mà bán xe có thể đưa xe chuyển động,cánh quạt máy bay cũng hoạt động tạo ra phản lực và nhờ vào 4 lực lực kéo, lực cản của không khí, lực hấp dẫn và lực nâng làm cho máy bay bay lên
Hình 1: hệ 4 lực tác động dựa trên dòng khí chải qua cánh máy bay kết hợp với phản lực có từ cánh quạt
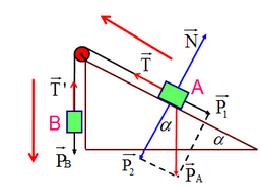
Hình 2:Hệ các lực của bánh xe tác động lên mặt đường nghiêng
Các hệ truyền động đóng vài trò vô cùng quan trọng vì nó đưa chuyển động tịnh tiến của động cơ ra thành chuyển động quay của bánh xe và cánh quạt. Ngay cả nó cũng chịu tác động rất nhiều lưc,trước hết là lực ma sát,khiến cho bánh dẫn động,vốn là bánh rang,truyền chuyển động cho các bánh khác trên xích tải hay dây curoa.
Ngoài bánh xích ra,ta còn có thể dẫn động theo 1 nguyên lý khác,đấy chính là bánh rang. Bánh răng chỉ đơn giản là dẫn truyền moment cho trục bánh xe hay các hệ dẫn động khác. Tỉ số truyền có thể thay đổi dựa vào tương quan số bánh rang dẫn động và được dẫn động
Hình 3: hệ truyền động bánh răng

Tỉ số truyền được tính như sau: TST=TC/SC (TC: thứ cấp, SC: sơ cấp) ta có thể xác định tình trạng di chuyển của xe theo nguyên “lợi về lực và thiệt về đường”,ví dụ TST>1 là lợi về lực, TST=2 là lợi về lực 2 lần như khi ta tác động lực 2 kg nhưng lại nâng được 4kg. TST<1 thì ta có cái lợi về đường đi nhưng thật ra là luật,như xe đạp,ta đạp 1 vòng thì bánh xe đi được 2 vòng.
Ngoài ra,ở các cánh tay robot được điều khiển bằng servo ta còn bắt gặp 1 kiến thức vật lý rất quen thuộc,đấy chính là cấu trúc cánh tay và đòn bẩy
Ngoài ra,trong các ứng dụng về robot hay xe tự hành vượt địa hình ta còn có 1 kiểu truyền động khác hết sức thú vị,đó chính là truyền động bằng bánh xích. Ở đây ta thấy hai bánh truyền động được để lên cao khỏi mặt đất,trong khi quay,nó sẽ dẫn động cho các bánh xe còn lại,để xe di chuyển. Ưu thế của hệ truyền động này là khi bề mặt tiếp xúc với mặt đường lớn hơn do bánh xích trải rộng sẽ làm cho ma sát lớn,do đó xe bám đường tốt hơn và vượt địa hình khỏe hơn.
Hình 4: Hệ truyền động trên khung xe bánh xích
 II.Lập trình
II.Lập trình
- Chuẩn bị
Arduino là một board vi điều khiển với mã nguồn mở cho phép ta tiếp cận và điều chỉnh nhiều hơn do đó,đây là thiết bị dùng vào lập trình nhúng được sử dụng phổ biến cho những người mới bắt đầu,hay giới học sinh phổ thông trong các khóa học tiếp cận công nghệ.
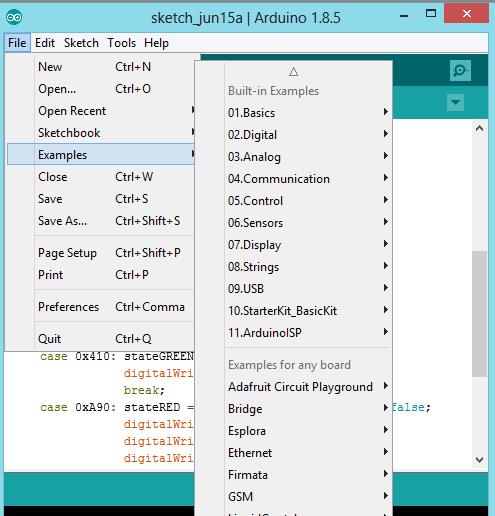
Để thực hiện bất kỳ dự án nào,việc đầu tiên cần làm là xác định phần cứng,các modul,nếu có yêu cầu 1 chức năng gì riêng,mỗi modul sẽ có thêm 1 thư viện lập trình riêng cho từng modul. Ngoài ra một số linh kiện như các bộ thu phát hồng ngoại,một số loại động cơ thì thư viện cũng là 1 phần không thể thiếu khi tối ưu hóa việc lập trình,khiến cho chương trình trở nên gọn và việc lập trình sẽ dễ hơn. Cho nên,một trong những việc đầu tiên khi muốn bắt đầu 1 dự án nào đó với Arduino là tìm thư viện phù hợp cho các thiết bị trong dự án đó.
Hình 5: Các thư viện điển hình trong dự án dùng board arduino
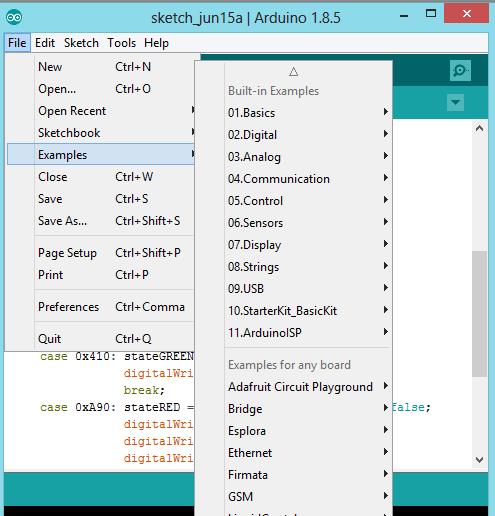
Khi cần thêm thư viện ta chỉ viện ta chỉ cần chọn Add.ZIP Library sau đó chọn file zip của thư viện mà ta đã tải xuống
Ngoài ra,trong Arduino IDE cũng có một số code mẩu vơi vài dự án đơn giản như chớp tắt led,điều khiển servo,các loại cảm biến,…
- Cấu trúc chương trình
Bao gồm 2 lệnh là “SETUP()” và “LOOP()”
Khi chương trình vừa khởi động thì lệnh SETUP sẽ chạy trước,ta có thể dùng nó để khai báo thư viện,giá trị biến,thiết lập các thông số.
Tiếp sau đó là lệnh LOOP ,đây là vòng lắp,chúng sẽ chạy cho đến khi nào bạn ngắt nguồn của arduino thì chúng mới ngừng
Ví dụ sau:
int led = 10;
void setup() {
pinMode(led, OUTPUT);
}
void loop() {
digitalWrite(led, HIGH);
delay(5000);
digitalWrite(led, LOW);
delay(5000);
}
trong đoạn code ta thấy giá trị chương trình xuất giá trị ở mức cao và thấp liên tục ra cổng digital thứ 10,qua đó khi ta gắn led vào thì có thể thấy led chớp,tắt với khoảng thời gian delay là 5000ms, lệnh trong LOOP chạy lặp đi lặp lại tạo thành 1 chuỗi. Đây cũng là một chương trình cho một ứng dụng cơ bản của arduino là chớp tắt led.
Sản phẩm được quan tâm
Nhận bài viết mới
Các bài viết chia sẻ đến cộng đồng rất chât lượng, mang lại rất nhiều kiến thức mới. Đừng bỏ lỡ bất kỳ bài viết nào của chung tối, hãy đăng ký để nhận bài viết mới qua Mail của bạn
Đăng ký để không bỏ lỡ bài viết nào!
Bài mới
- Giáo trình Robocon
- Giới thiệu các loại board Esp8266 dành cho IoT và thiết lập cơ bản cho người mới học
- Hướng dẫn sử dụng LoraEasyV1
- Tài liệu tự học Python tiếng Việt cho người mới bắt đầu
- Tương lai của kết nối IoT (Internet of Things) tiềm năng và sự đa dạng
- HƯỚNG DẪN LẤP RÁP XE MÔ HÌNH 4 BÁNH
- HƯỚNG DẪN LẮP RÁP XE CHẠY BẰNG NĂNG LƯỢNG MẶT TRỜI
Danh mục