- Thiết kế của một robot delta dạy học tại Đại học Žilina
Tại Đại học Žilina, chúng tôi đã thiết kế robot Delta riêng (Hình 1).
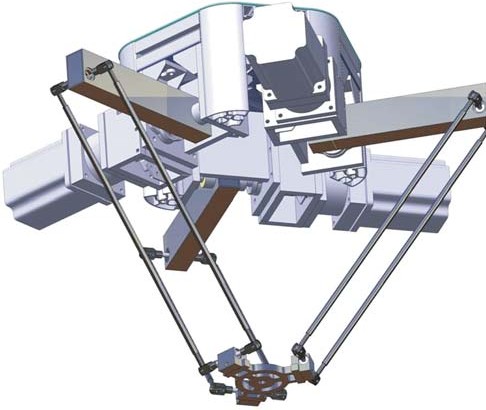
Figure 1 Thiết kế của robot Caertec rk 2010 tại Đại học Zilina
Thiết kế của bệ cố định trên được dựa trên các yêu cầu của việc xây dựng chỉ cần lắp đặt, mà sẽ là đủ cho mục đích của chúng tôi. Vì vậy, chúng tôi đã chọn xây dựng với các bộ phận nhôm định hình và hợp kim Minitec. Tất cả các kết nối được thiết kế với các kết nối vít – với các dấu móc hoặc các thanh định hình (kích thước cơ bản của các thanh định hình là 45x90mm, 45x45mm
và các góc 60ox45mm).
Các cánh tay quay được thiết kế từ các thanh định hình thành mỏng hình chữ nhật. Chúng được gắn trên trục dẫn động bằng kết nối co rút.
Cấu trúc của hình bình hành chứa hai thanh mảnh song song được kết nối với nhau bằng các khớp với 3DOF.
Bệ di chuyển được xử lý tương tự với một thiết kế đơn giản, đáp ứng các yêu cầu để gắn khâu tác động cuối hoặc bất kỳ thành phần nào. Affixed parallelogram được thiết kế như vòng bi trụ và đẩy.
Bởi vì thực tế là robot có ba cánh tay quay giống hệt nhau (Hình 1 và Hình 2), cần thiết để thiết kế khung thích hợp (bảng điều khiển) cung cấp sự cố định của khớp nối đầu tiên của mỗi cánh tay theo vị trí được yêu cầu. Góc giữa các mặt phẳng vuông góc với các trục của mỗi cánh tay lân cận được đặt là 120 °.
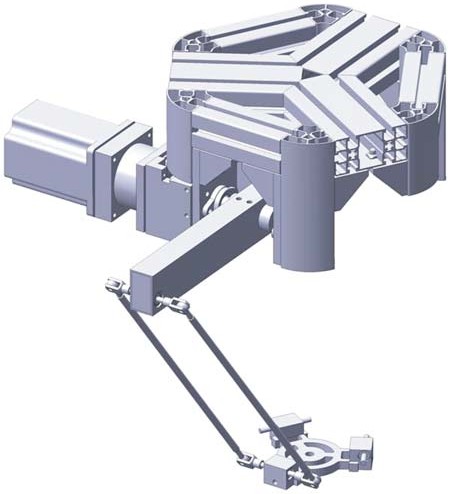
Figure 2: Góc nhìn chi tiết trên một chuỗi động học gồm cánh tay quay, cơ cấu hình bình hành và bệ di chuyển
Thiết kế phù hợp của bảng điều khiển phải chắc chắn đầy đủ các tiêu chuẩn không chỉ về độ tin cậy và độ cứng mà còn cả về mặt lắp ráp hiệu quả. Để đảm bảo cơ cấu hoạt động và truyền momen an toàn, vòng bi trục quay phù hợp là cần thiết cho trục đầu tiên của các cánh tay. Có 2 cánh để giải quyết yêu cầu này:
- Các bộ phận với ổ trục được tích hợp
- Các đơn vị chịu lực đặc biệt
Trong trường hợp đầu tiên, chúng ta có thể sử dụng cho ví dụ hộp số với trục đầu ra và vòng bi cuối cùng đủ mạnh để mang toàn bộ cánh tay. Trong trường hợp thứ hai, chúng ta có thể áp dụng cấu trúc gồm ổ đĩa, hộp số, khớp nối và thiết bị chịu lực chuyên dụng. Các đơn vị mang là cần thiết để hạn chế các lực lượng từ cánh tay quay.
Chúng tôi quyết định lựa chọn thứ hai. Sau đó, trục chính, mang khối lượng và lực tác dụng lên cánh tay, được tách ra khỏi trục đầu ra của hộp số hoặc bộ truyền động. Trục chính này được kết nối với khung cơ sở bằng hai vòng bi đặc biệt. Khớp nối cơ học được chèn vào giữa hệ thống của bộ phận truyền động (cũng chứa ổ đỡ) và trục chính của cánh tay quay. Đối với cánh tay quay cố định ở vị trí tĩnh, phanh điện từ được liên kết với trục chính.
Như một bộ phận truyền động cho cánh tay quanh được sử dụng sevor Q1AA04010D với tính thấp được sản xuất bởi công ty truyền động ALL. Nó được lựa chọn theo momen tối thiểu được tính toán.
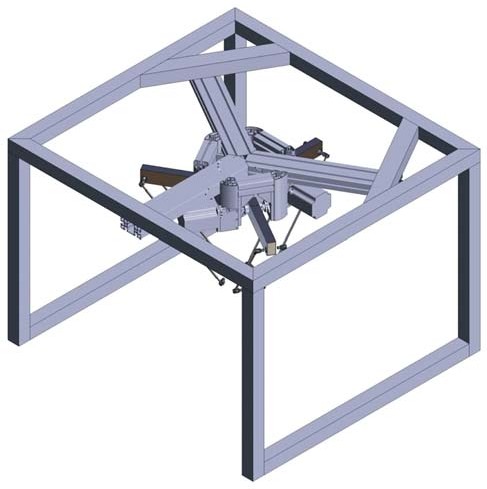
Figure 3: Giàn robo với robot Delta Caertec rk 2010 ứng dụng dạy học
Đối với các đơn vị ổ đĩa, chúng tôi cũng đã chọn hộp số thích quá. Chúng tôi đã chọn hộp số AE050- 100 được sản xuất bởi công ty truyền động ALL. Nó có thể được đặc trưng bởi momen xoắn đủ để đảm bảo chuyển động cần thiết, quán tính thấp và khe hở nhỏ.
Sau giai đoạn thiết kế của robot delta, chúng ta cũng đã hoàn thành thiết kế cấu trúc của khung chính để mang nó. Bằng cách này, chúng tôi đã có được sơ đồ cơ bản của khung robot với robot delta ở giữa. Bàn làm việc hoặc đai băng tải, nhà kho và thiết bị cố định có thể được đặt dưới robot (hình 3).
- Robot delta trong thị trường
Lịch sử của thị trường robot Delta tương đối dài, phức tạp và hấp dẫn. Bắt đầu từ năm 1983 khi hai anh em nhà Swiss là Marc-Olivier và Pascal Demaurex thành lập công ty Demaurex cơ sở tại Romanel-sur-Lausanne, Switzerland.
Demaurax Delta robot
Sau khi mua một giấy phép từ robot Delta năm 1987, mục đích chính của họ là thương mại hóa robot song song cho công nghiệp đóng gói (Hình 4). Sau vài năm, Demaurex đã thành công trong việc chiếm giữ một vị trí chính trong thị trường mới và khó này. Sản phẩm của công ty đã đi qua một số chỉnh sửa và cuối cùng, họ đã bán 500 robot Delta trên khắp thế giới.

Figure 4: Demaurex’s Line-Placer để đóng gói trong công nghiệp bánh.
Bằng sáng chế trên robot Delta được bán bởi anh em Demaurex từ EPFL năm 1996 và vài năm sau đó ABB đã yêu cầu một giấy phép để sản xuất Delta robot. Nhiều hãng khác như Reault Automation Comau, GROBWerke, Krause & Mauser Group, cũng đã yêu cầu giấy phép.
Hitachi Seiki

Figure 5: Robot Delta Hitachi SeiKi
Demaurex đã bán giấy phép tới công ty Nhật Bản Hitachi Seiki cho việc sản xuất các robot Delta nhỏ hơn để cho máy khoan (hình 5). Trong thực tế, công ty Hitachi Seiki đại diện cho Demaurex ở Nhật Bản.
ABB Flexible Automation
ABB Flexible Automation đã trình làng robot Delta của họ năm 1999 dưới tên là IRB 340 FlexPicker (Hình 6). Ba nhân tố công nghiệp nhắm tới thực phẩm, dược phẩm, và công nghiệp điện tử. FlexPicker được trang bị với một hệ thống tích hợp chân không có khả năng lấy và thả nhanh các vật nặng tới 1 kg. Robot được dẫn với một hệ thống thị giác máy tính bởi Cognex và một bộ điều khiển ABB S4C. Một sự lựa chọn, robot có thể được trang bị với một bộ điều khiển chuyển động và hệ thống thị giác từ Adept Technology.
Sau mười năm nghiên cứu và trải nghiệm trong lĩnh vực công nghệ đóng gói từ FlexPicker IBR 360 với thế hệ thứ hai của robot Delta ABB. Thế hệ thứ hai này hiệu quả hơn với tốc độ cao hơn và khả năng mang các vật nặng với thiết kế chân nhỏ hơn.

Figure 6: ABB Flexible Automation IRB 340 FlexPicker
ABB đã lắp đặt khoảng 1800 robot Delta trên toàn thế giới và dẫn đầu trong lĩnh vực công nghệ đóng gói cấp cao.
SIG Group
Demaurex, để chắc chắn sự ổn định dài hạn, đã thay đổi dòng sản phẩm của nó từ robot Delta trơ trụi thành các bộ robot hoàn chỉnh. Tuy nhiên, để đạt tới thị trường thế giới, Demaurex đã bắt đầu tìm kiếm đối tác. Và do đó Demaurex đã được mua lại bởi Swiss Group SIG vào cuối năm 1999.
SIG Group bao gồm ba chi nhánh, trong đó chi nhánh SIG Pack, chỉ sử dụng khoảng 2000 công nhân, một công ty đủ lớn để cung cấp cho Demaurex quyền truy cập rất cần thiết vào thị trường thế giới. Hiện tại, ba mô hình Robot Delta khác nhau được cung cấp bởi SIG Pack Systems. Trong khi C23 và C33 được sản xuất bởi Demaurex, CE33 được dựng bởi SIG Pack Systems (hình 7).
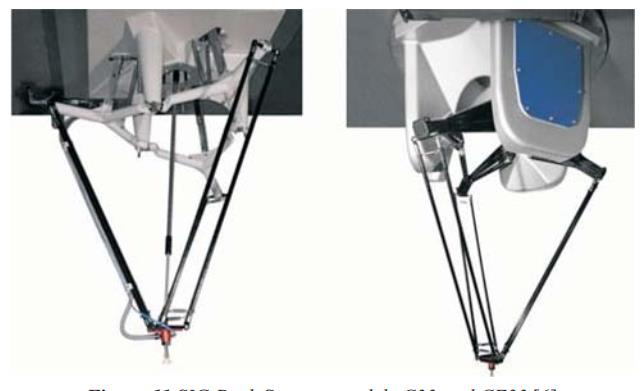
Figure 7: Mô hình SIG Pack Systems C33 và CE33
BOSCH
Năm 2014, công ty Đức Bosch Group đã mua SIG và SIG Pack Division Demaurex chứa trong các gói công nghệ của chúng.
Các sản phẩm Sigpack System đã luôn được biết đến với chất lượng và độ ổn định cao cấp của chúng, và ngày nay là một trong những nhà cung cấp dẫn đầu thế giới của hệ thống bốc xếp và đóng gói. Nhiều mô hình robot Delta đã được phát triển bởi BOSCH, ví dụ:
- XR31: Hiệu suất và độ tin cậy cao hơn
- XR22: Tổ hợp của thiết kế nhỏ gọn và độ chính xác cao
- Paloma D2 được làm từ thép không gỉ để đáp ứng các tiêu chuẩn và quy định vệ sinh cho công nghiệp thực phẩm (Hình 12).

Figure 8: Paloma D2 – BOSCH Delta Robot
Những robot này đã được đặt trong các dòng sản phẩm sau:
- MonoPacker LDM: một hệ thống rất linh hoạt được dùng để đặt khối lượng lớn các sản phẩm trên các thùng chứa trực tiếp từ quá trình sản xuất.
- Feed Placer: Một hệ thống với một robot Delta được dẫn đường bằng thị giác máy tính tốc độ cao chấp nhận hướng dòng sản phẩm được xếp theo hàng hoặc ngẫu nhiên trên dây chuyền rộng và nó đặt sản phẩm trực tiếp vào chuyển động của vỏ hộp, hộp carton hoặc thermoformer với hiệu quả trơn mượt.
Astor Assortment Placer: một hệ thống linh hoạt cao được sử dụng cho việc đặt các sản phẩm vào các loại gói với robot Delta dẫn đường bằng thị giác máy tốc độ cao Adept Quattro.
Adept Technology, Inc. là nhà cung cấp hàng đầu thế giới về các hệ thống và dịch vụ robot được dẫn đường bằng thị giác thông minh. Được thành lập vào năm 1983, Adept Technology là nhà sản xuất robot công nghiệp lớn nhất ở Hoa Kỳ. Trong năm 2007, một robot Delta tốc độ cao, dưới tên của Quattro, đã được phát triển [9].
Adept Quattro (Hình 13) được thiết kế đặc biệt cho các ứng dụng tốc độ cao trong đóng gói, sản xuất, lắp ráp và xử lý vật liệu. Đây là robot Delta duy nhất trên thế giới có thiết kế bốn cánh tay được cấp bằng sáng chế, thuật toán điều khiển tiên tiến và đường bao làm việc lớn, nhờ đó làm cho Adept Quattro trở thành robot trên không lý tưởng cho chuyển động trơn tru, ứng dụng công suất cao. Adept Quattro được trang bị các điều khiển siêu nhỏ gọn và bộ khuếch đại nhúng, làm giảm thời gian chu kỳ và cải thiện hiệu suất.

Figure 9: Adept Quattro s650H
Nhờ việc sử dụng phần mềm theo dõi tiên tiễn, Adept Quattro có thể xác định vị trí, chọn và đặt di chuyển nhanh các vật thể. Về việc bảo trì nó, robot song song cho phép động cơ đặt cố định và không yêu cầu di chuyển các dây điện, điều đó làm cho việc duy trì và bảo dưỡng dài hơn và dễ dàng hơn. Vật liệu nhựa được chọn cho cớ cấu truyền động cánh tay robot và khâu tác động cuối đã được thiết kế cho sức mạnh và nguồn điện tốt hơn. Không yêu cầu việc bôi trơn cho các khớp và các cơ cấu truyền động.
Sử dụng công nghệ tiên tiến trong các hệ thống thị giác, Adept Quattro có thể di chuyển nhanh và đối tượng được đặt ngẫu nhiên với độ chính xác cao.
Ngoài ra, robot Delta này có ba bậc tự do với một tùy chọn bậc tự do thứ tư, hữu ích trong nhiệm vụ lựa chọn và đặt vị trí. Robot cũng có thể quản lý ba robot phân cấp.
Fanuc Robotics
Năm 1956 FUJITSU Fanuc đã được thành lập như một sự bổ sung của FUJJITSU LTP để phát triển điều khiển số. Năm 1972. FUJJITRU LTD tác FUJTSU Fanuc ra và tên được đổi thành FUJITSU FANUC LTD. Robot công nghiệp đầu tiên được phát triển và lắp đặt năm 1974. Công ty đã phát triển nhanh chóng, đã đổi tên và USA và EUROPE FANUC được thiết lập năm 1977 và 1978 tương ứng. Ngày nay, FANUC Robotics đã được lắp đặt tại hơn 200 000 robot trên toàn thế giới và nó là dẫn đầu thế giới trong công nghiệp robot.

Figure 10: Triển lãm của robot Delta M-1iA FANUC Robotics tại World’s Fair Automate 2011 tại Chicago
Hai mô hình của robot Delta đã được phát triển bởi FANUC Robotics. M-1iA (Hình 7) với 6 hoặc 4 DOF, và M-3iA (hình 8) cũng với 6 hoặc 4 DOF. Những robot này là lý tưởng để thực hiện các nhiệm vụ tự động, thứ mà đã quá nhanh và quá phức tạp cho robot. Ngoài ra, gia đình mới này của loạt robot cung cấp chuyển động phức tạp của cổ tay người, chu kì thời gian nhanh, cánh tay siêu nhỏ gọn và chính xác. Nó cũng có thể hỗ trợ các chức năng thông minh bằng cách sử dụng iRVision.
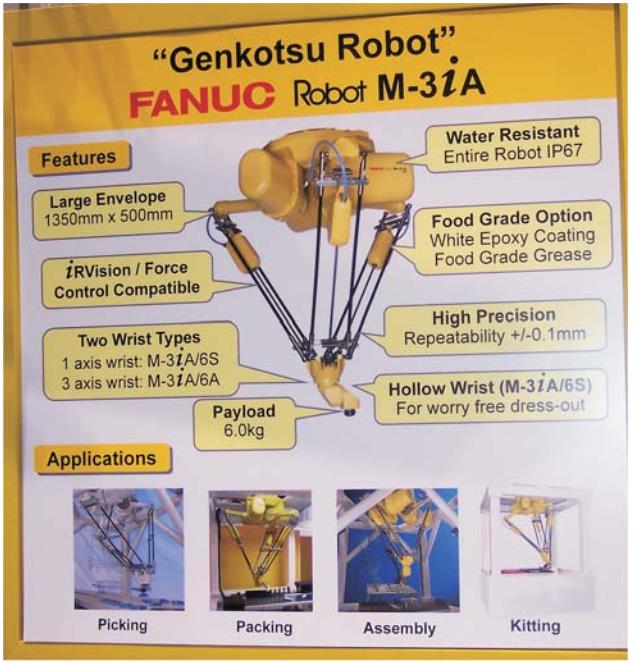
Figure 11: Các đặc điểm của robot Delta M-3iA FANUC Robotisc tại World’fair Automate 2011 tại Chicago
Sản phẩm được quan tâm
Nhận bài viết mới
Các bài viết chia sẻ đến cộng đồng rất chât lượng, mang lại rất nhiều kiến thức mới. Đừng bỏ lỡ bất kỳ bài viết nào của chung tối, hãy đăng ký để nhận bài viết mới qua Mail của bạn
Đăng ký để không bỏ lỡ bài viết nào!
Bài mới
- Giáo trình Robocon
- Giới thiệu các loại board Esp8266 dành cho IoT và thiết lập cơ bản cho người mới học
- Hướng dẫn sử dụng LoraEasyV1
- Tài liệu tự học Python tiếng Việt cho người mới bắt đầu
- Tương lai của kết nối IoT (Internet of Things) tiềm năng và sự đa dạng
- HƯỚNG DẪN LẤP RÁP XE MÔ HÌNH 4 BÁNH
- HƯỚNG DẪN LẮP RÁP XE CHẠY BẰNG NĂNG LƯỢNG MẶT TRỜI
Danh mục