Các thử nghiệm và kết quả thực tế với tay máy SCARA ( Bài 4)
Các thử nghiệm được tiến hành với robot bao gồm việc áp dụng các bước và quỹ đạo đến các khớp ở các tốc độ khác nhau, R-1, R-2 và P-3 kiểm soát phản hồi độc lập, và cuối cùng một bài kiểm tra bao gồm một nhiệm vụ được lập trình trong đó bao gồm hoạt động đồng thời của tất cả các khớp.
- Khớp quay R-1

Figure 11: Đồ thị sinh ra bằng ứng dụng GUI cho bàn kẹp
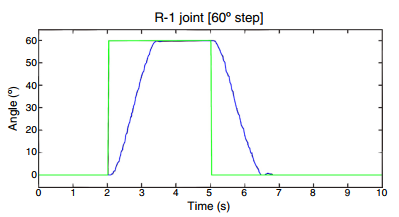
Figure 12: Đáp ứng của khớp R-1 tai bước 60o
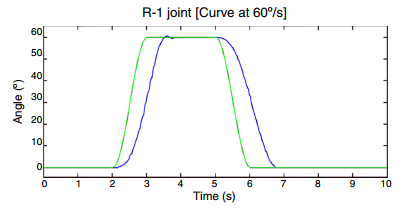
Figure 13: Đáp ứng của khớp R-1 tại đường cong đa thức bậc 3 tại 60o/s
Đối với khớp R-1, theo cả hai hướng, Hình 12 cho thấy áp dụng bước 60◦ bằng màu xanh lá cây và màu xanh lam thể hiện hiệu suất của robot. Loại tín hiệu này là một tín hiệu tạo ra phần lớn đáp ứng đột ngột của các khâu, vì tại điểm bắt đầu chuyển động sai lệch rất lớn, do đó bộ điều khiển làm cho cơ cấu truyền động chuyển động ở tốc độ cao phụ thuộc vào biên độ của bước đó.
Nhìn chung, robot không sử dụng để đi theo các quỹ đạo bậc thang vì chúng rất đột ngột (đặc biệt là tại điểm bắt đầu chuyển động), nhưng chúng đáp ứng để kiểm chứng hiệu quả của bộ điều khiển được thiết kế và cài đặt. Do đó, rất quan trọng để tính toán hiệu suất của robot bằng cách xử lý các quỹ đạo đa thức bậc ba, cho phép robot bắt đầu và kết thúc chuyển động một cách mượt mà. Nhờ có điều này, bám sát các quỹ đạo dạng này dược dùng rất rộng rãi trong các ứng dụng thực tế. Hình 13 biểu thị, đối với khớp R-1, trong cả hai hướng, ứng dụng của đường cong bậc ba tại tốc độ 60o/s và hiệu năng của robot trong đường màu xanh lá cây và màu xanh da trời tương ứng. Tương tự, hình 14 thể hiện hiệu suất của robot tại tốc độ 30o/s.
2. Khớp quay R-2
Bây giờ là thử nghiệm bậc thang tương tự (hình 15) và đường cong tại tốc độ đặt tại 75o/s (hình 16) VÀ 45O/s (hình 17) được áp dụng tới khớp R-2.
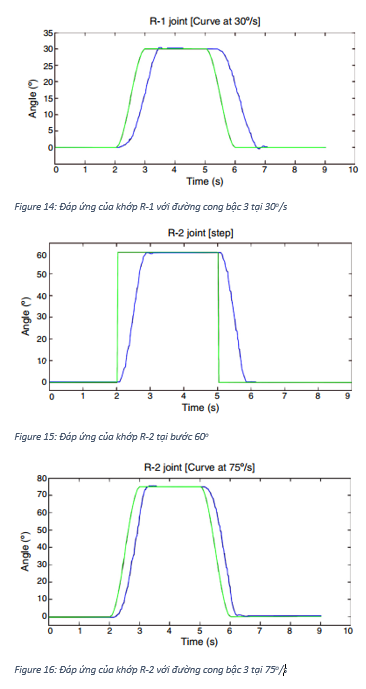

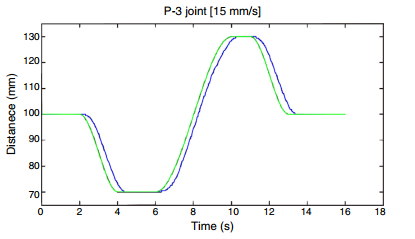
Figure 20: Đáp ứng của khớp P-3 với đường cong bậc 3 tại 15mm/s
3. Khớp tịnh tiến P-3
Thử nghiệm được thực hiện trên khớp này tương tự như các thử nghiệm trước, với điểm khác là bây giờ ba bước nhảy và ba đường cong được lập trình cho mỗi trường hợp. Hình 18-20 thể hiện điểm chuẩn để bám bằng màu xanh lá cây và màu xanh da trời là hiệu suất của khớp tịnh tiến P-3.
4. Các thử nghiệm chung
Hình 21 thể hiện các quỹ đạo được lập trình (màu xanh lá cây) và các quỹ đạo thực hiện được (màu xanh da trời) cho một nhiệm vụ thử nghiệm đơn giản của robot. Robot sẽ lấy một vật được đặt trong một vị trí xác định, giữ nó và sau đó chuyển tới một vị trí khác, cuối cùng trả về vị trí ban đầu. Các quỹ đạo sinh ra đối với khớp R-4, R-5 và bàn kẹp không được vẽ đồ thị, vì chúng sinh ra từ vòng lặp trong mỗi động cơ servo có.
Hình 22 thể hiện một hình ảnh của robot thực hiện được.

4. Kết luận
Một tay máy robot SCARA với 6 DOF được thiết kế và cài đặt, và bây giờ nó tạo thành một nền tảng vật lý mà trên đó nhiều kỹ thuật điều khiển có thể được kiểm tra và nghiên cứu.
Sự phát triển của phần mềm PC-Controller, là giống như giao diện điện tử, bất chấp sự phức tạp của thiết kế và triển khai của nó, cho phép một hoạt động tối ưu của hệ thống hoàn chỉnh. Phần mềm này, trong số các chức năng khác, cũng cho phép tạo ra nhiều quỹ đạo cho robot.
Các hệ thống cơ khí, điện tử và điều khiển có thể được tích hợp một cách thỏa đáng, mang lại kết quả xuất sắc, được thực hiện trên robot.
Hình thái được chọn cho thiết kế và triển khai của robot được phép thực hiện nhiều minh chứng và các tác vụ được lập trình đơn giản và nhanh chóng từ giao diện đồ họa trực quan được tạo ra đặc biệt cho mục đích đó.
Tài liệu tham khảo
- Adept – SCARA robots. (n.d.). Retrieved from http://www.adept.com/products/robots/scara/cobra-i600/general.
- Ben-Gharbia, K. M., Maciejewski, A. A., & Roberts, R. G. (2014). A kinematic analysis and evaluation of planar robots designed from optimally fault-tolerant Jacobins. IEEE Transactions on Robotics, 30(2), 516–524. http://dx.doi.org/10.1109/TRO.2013.2291615
- Bruzzone, L., & Bozzini, G. (2011). A statically balanced SCARA-like industrial manipulator with high energetic efficiency. Meccanica, 46(4), 771–784. http://dx.doi.org/10.1007/s11012-010-9336-6
- Gómez, A., Lafuente, P. D., Rebollar, C., Hernández, M. A., Olguín, E. H., Jiménez, H., . . ., & Rodríguez, J. (2014). Design and construction of a didactic 3-dof parallel links robot station with a 1-dof gripper. Journal of Applied Research and Technology, 12(3), 435–443. http://dx.doi.org/10.1016/S1665-6423(14)71624-4
- Jo, S., & Cheol, M. (2001). Design of a fuzzy-sliding mode controller for a SCARA robot to reduce chattering. KSME International Journal, 15(3), 339–350. http://dx.doi.org/10.1007/BF03185217
- López, I., Castelán, M., Castro, F. J., Pena, ˜ M., & Osorio, R. (2013). Using object’s contour, form and depth to embed recognition capability into industrial robots. Journal of Applied Research and Technology, 11(1), 5–17. http://dx.doi.org/10.1016/S1665-6423(13)71511-6
- (n.d.). Retrieved from http://www.mathworks.com/help/matlab/.
- Prajumkhaiy, N., & Mitsantisuk, C. (2016). Sensorless force estimation of SCARA robot system with friction compensation. Procedia Computer Science, 86, 120–123. http://dx.doi.org/10.1016/j.procs.2016.05.030
- Rossomando, F. G., & Soria, C. M. (2016). Discrete–time sliding mode neuro-adaptive controller for SCARA robot arm. Neural Computing and Applications, 1–14. http://dx.doi.org/10.1007/s00521-016-2242-7
- Siciliano, B., & Khatib, O. (2008). Springer handbook of robotics (1st ed.). Berlin: Springer.
- Siqueira, A., Terra, M., & Bergerman, M. (2011). Robust control of robots. London: Springer-Verlag. http://dx.doi.org/10.1007/978-0-85729-898-0
- Southern Plantaids Pvt.Ltd. (n.d.). Retrieved from http://www.southernplantaids.co.in/zasche-manipulators.html.
- Surapong, N., & Mitsantisuk, C. (2016). Position and force control of the SCARA robot based on disturbance observer. Procedia Computer Science, 86, 116–119. http://dx.doi.org/10.1016/j.procs.2016.05.029
- Urrea, C., & Kern, J. (2012). Modeling, simulation and control of a redundant SCARA-type manipulator robot. International Journal of Advanced Robotic Systems, 9, 1–14. http://dx.doi.org/10.5772/51701
- Urrea, C., & Kern, J. (2014). Position control of a redundant robot with 5 DOF of the SCARA industrial manipulator type. Jokull, 1.
- Wang, N., Liu, J., Wei, S., Xu, Z., & Zhang, X. (2014). The control system design of a SCARA robot. In X. Zhang, H. Liu, Z. Chen, & N. Wang (Eds.), Intelligent robotics and applications (pp. 136–145). Cham: Springer International. Publishing http://dx.doi.org/10.1007/978-3-319-13963-0 14
- Yamazaki, Y. (2014). Development and applications of the SCARA robot. Journal of Robotics and Mechatronics, 26(2), 127–133.
Sản phẩm được quan tâm
Nhận bài viết mới
Các bài viết chia sẻ đến cộng đồng rất chât lượng, mang lại rất nhiều kiến thức mới. Đừng bỏ lỡ bất kỳ bài viết nào của chung tối, hãy đăng ký để nhận bài viết mới qua Mail của bạn
Đăng ký để không bỏ lỡ bài viết nào!
Bài mới
- Giáo trình Robocon
- Giới thiệu các loại board Esp8266 dành cho IoT và thiết lập cơ bản cho người mới học
- Hướng dẫn sử dụng LoraEasyV1
- Tài liệu tự học Python tiếng Việt cho người mới bắt đầu
- Tương lai của kết nối IoT (Internet of Things) tiềm năng và sự đa dạng
- HƯỚNG DẪN LẤP RÁP XE MÔ HÌNH 4 BÁNH
- HƯỚNG DẪN LẮP RÁP XE CHẠY BẰNG NĂNG LƯỢNG MẶT TRỜI
Danh mục