Khi nào bạn cần một robot Gantry ( Hệ Đề các)
Khi bạn nghĩ về một robot công nghiệp, điều gì nảy ra trong đầu bạn?
Có thể vài thứ giống như thế này…
Các robot có khớp nối như thế này được công nhận rộng rãi, nhờ vào các quảng cáo của công ty xe hơi và các chuỗi robot nhảy (https://youtu.be/Z6ZX8qJ-R0k). Robot SCARA (Selective Compliance Articulated Robot Arm) cũng được công nhận bởi sự chấp nhận và gia tăng của chúng trong các nhà máy kể từ đầu những năm 1980. Cả hai loại robot này – robot có khớp nối và robot SCARA – kết hợp giữa chuyển động tuyến tính và quay, dẫn đến khả năng cơ động cho các nhiệm vụ phức tạp. Robot có khớp nối tương tự với cánh tay người, với sáu trục chuyển động – ba khớp tịnh tiến (tuyến tính) và ba khớp quay (nghĩ về vai, khuỷu tay và cổ tay của bạn). Robot SCARA có bốn trục chuyển động – X, Y, Z và theta (phần nào giống như cánh tay của bạn, nếu vai của bạn bị cố định).
Ít thấy hơn trong văn hóa thịnh hành, nhưng phổ biến trong các ứng dụng công nghiệp khác nhau, từ bao bì đến sản xuất chất bán dẫn, là robot Cartsian. Như tên gọi của chúng, các robot này hoạt động trong ba trục Descartes – X, Y và Z – mặc dù chúng có thể bao gồm một trục theta cho công cụ thao tác cuối của cánh tay. Mặc dù ít “sexy” hơn so với robot có khớp nối và SCARA, robot Cartsian linh hoạt hơn nhiều, với khả năng tải cao hơn đối với kích thước của chúng và trong nhiều trường hợp, độ chính xác cao hơn. Chúng cũng có khả năng thích nghi cao, vì các trục có thể được nâng cấp hoặc thay đổi với cấu hình lại tương đối ít để phù hợp với việc phát triển các yêu cầu sản phẩm hoặc ứng dụng.

Robot Cartsian 3 trục – Nguồn: adept Technology, Inc
Tuy nhiên, robot Descartes bị hạn chế bởi thiết kế vốn có của chúng, điều này hạn chế khả năng chịu tải của chúng. Đặc biệt đúng khi trục ngoài cùng (Y hoặc Z) có độ dài hành trình dài, gây ra một tải trọng lớn trên các trục hỗ trợ. Trong trường hợp cần có các hành trình dài và tải trọng cao, robot Gantry là giải pháp tốt nhất.

Robot Gantry với hai trục A, một trục Y và một trục Z – Nguồn: Northwest Motion
Từ Cartsian tới Gantry
Robot Gantry là một phong cách biến đổi của robot Cartsian, sử dụng hai trục X (hoặc đế) thay vì trục đế đơn được thấy trong Cartsian. Trục X bổ sung (và đôi khi thêm trục Y và Z) cho phép robot xử lý các tải trọng và lực lớn hơn, khiến chúng trở nên lý tưởng để lấy và đặt các tải trọng nặng hoặc bốc, dỡ các chi tiết. Mỗi trục dựa trên thiết bị truyền động tuyến tính, cho dù đó là thiết bị truyền động “tự chế” được lắp ráp bởi OEM hoặc bộ tích hợp hoặc thiết bị truyền động được lắp ráp trước từ một công ty chuyển động tuyến tính. Điều này có nghĩa là có các tùy chọn gần như vô hạn để cho phép kết hợp bất kỳ tốc độ cao, hành trình dài, tải trọng nặng và độ chính xác định vị cao. Yêu cầu đặc biệt cho môi trường khắc nghiệt hoặc ít tiếng ồn dễ dàng được kết hợp, và nếu ứng dụng yêu cầu các quá trình đồng thời nhưng độc lập diễn ra, các trục ngang có thể được xây dựng với động cơ tuyến tính sử dụng nhiều ụ đở
Các robot Gantry thông thường được gắn trên vùng làm việc (do đó thuật ngữ chung, “giàn trên không”), nhưng nếu chi tiết không thích hợp để xử lý ở trên, như trường hợp với các pin năng lượng và mô-đun mặt trời, giàn có thể được cấu hình để hoạt động từ bên dưới chi tiết. Và trong khi robot Gantry thường được coi là các hệ thống rất lớn, chúng cũng thích hợp cho các máy nhỏ hơn, thậm chí là máy với kích cỡ để bàn.
Hai trục thì tốt hơn là một
Do robot Gantry có hai trục X, hoặc đế, nên thời điểm tải trọng chịu bởi các trục Y và Z, cũng như trọng tải làm việc, được giải quyết dưới dạng lực trên các trục X. Điều này làm tăng đáng kể độ cứng của hệ thống, và trong hầu hết các trường hợp cho phép các trục có độ dài hành trình dài hơn và tốc độ cao hơn một robot Cartesian tương tự.
Khi có hai trục song song, thông thường chỉ một trục được điều khiển bởi động cơ, để ngăn chặn sự ràng buộc có thể là do chuyển động hơi không đồng bộ giữa hai trục. Thay vì điều khiển cả hai trục, một trục kết nối hoặc ống mô-men xoắn được sử dụng để chuyển công suất động cơ sang trục thứ hai. Và trong một số trường hợp, trục thứ hai có thể là “không làm gì” hoặc theo dõi, bao gồm dẫn hướng tuyến tính để cung cấp hỗ trợ cho tải, nhưng không có cơ chế truyền động. Quyết định về cách thức và cách điều khiển trục thứ hai phụ thuộc vào khoảng cách giữa hai trục,tỉ lệ gia tốc và độ cứng của kết nối giữa chúng. Chỉ điều khiển một trục trong một cặp trục cũng làm giảm chi phí và độ phức tạp của hệ thống.
Việc sắp xếp robot Cartesian hoặc gantry phức tạp hơn so với việc sắp xếp robot SCARA hay robot có khớp nối (thông thường được chỉ định với 3 thông số: tầm với, tốc độ và độ chính xác), nhưng các nhà sản xuất đã làm quá trình dễ dàng hơn vài năm trước bằng cách giới thiệu một hệ thống đã được cấu hình trước và các công cụ online, như là bộ cấu hình Rexroth’s EasySelect hay Adept’s 3D Linear Modules Builder. Các công cụ này cho phép người dùng xác định hướng và kích thước của các trujcm cũng như hành trình cơ bản, tải trọng và các thông số tốc độ. Tệp CAD có thể tải xuống cũng là một đề xuất tiêu chuẩn từ các nhà sản xuất robot và robot, giúp họ dễ dàng tích hợp vào bố cục thiết kế hoặc quy trình làm việc, giống như SCARA và robot có khớp nối.
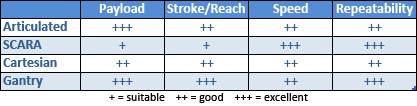
Trong khi robot có khớp nối và SCARA dễ dàng để nhận, và robot Cartesian được triển khai rộng rãi, thiết kế giàn vượt qua giới hạn cố hữu của chúng trong tải, tốc độ, khả tầm với và độ lặp lại, với mức độ tùy biến và linh hoạt chưa từng có.
Robot Gantry đưa ra sự phối hợp của tải trọng và hành trình tốt nhất
Nguồn: https://www.linearmotiontips.com/when-do-you-need-a-gantry-robot/
Sản phẩm được quan tâm
Nhận bài viết mới
Các bài viết chia sẻ đến cộng đồng rất chât lượng, mang lại rất nhiều kiến thức mới. Đừng bỏ lỡ bất kỳ bài viết nào của chung tối, hãy đăng ký để nhận bài viết mới qua Mail của bạn
Đăng ký để không bỏ lỡ bài viết nào!
Bài mới
- Giáo trình Robocon
- Giới thiệu các loại board Esp8266 dành cho IoT và thiết lập cơ bản cho người mới học
- Hướng dẫn sử dụng LoraEasyV1
- Tài liệu tự học Python tiếng Việt cho người mới bắt đầu
- Tương lai của kết nối IoT (Internet of Things) tiềm năng và sự đa dạng
- HƯỚNG DẪN LẤP RÁP XE MÔ HÌNH 4 BÁNH
- HƯỚNG DẪN LẮP RÁP XE CHẠY BẰNG NĂNG LƯỢNG MẶT TRỜI
Danh mục