Tay máy SCARA 6 bậc tự do (DOF) ( Bài 1)
- Giới thiệu
Trong vài thập kỉ qua, robotics đã đóng vai trò rất quan trọng trong quá trình tự động hóa, với các tay máy robot giữ một vai trò hàng đầu trong việc phát triển một vài lĩnh vực sản xuất. Ngày nay, các robot công nghiệp được sử dụng để tự động hóa một loạt các nhiệm vụ như lắp ráp, vận chuyển vật liệu, tất cả các loại hàn, cắt chính xác, bốc xếp hàng, sơn, phẫu thuật từ xa, trong số rất nhiều các ứng dụng (Ben-Gharbia, Maciejewski, & Roberts, 2014; Urrea & Kern, 2014). Do đó, robot công nghiệp đang được sử dụng nhiều hơn trong các quy trình sản xuất hiện đại và tự động, cũng như trong các ứng dụng nguy hiêm, nơi mà việc sử dụng chúng được chứng minh một cách rõ ràng.
Mặt khác, robot công nghiệp có thể thức hiện các nhiệm vụ suốt nhiều giờ trên ngày mà không cảm thấy mệt hoặc mất độ chính xác hay hiệu quả, vì chúng hiện nay đang được phát triển và các thiết bị mạnh mẽ rằng thực tế không sai. Do đó, để biết, học, cải thiện, lập trình lại và đầy đủ các hệ thống này tới các kịch bản khác nhau trở nên cần thiết, vì vậy người dùng có thể kiếm lợi nhiều nhất có thể từ chúng.
Công việc hiện tại phát sinh từ nhu cầu hấp dẫn của việc có các nền tảng thực tế để thực hiện nghiên cứu khoa học và xác nhận các giá trị tương ứng của nó. Việc thực thi tay máy robot 6 bậc tự do (DOF) cho phép cải thiện hệ thống điều khiển của robot công nghiệp, ngoài việc đề xuất và xác nhận hệ thống điều khiển mới. Vì thế, bài báo này thể hiện quá trình thiết kế và xây dựng một robot với cấu hình SCARA, loại cấu hình có ứng dụng tuyệt vời trong công nghiệp ngày nay.

Figure 1: Robot công nghiệp SCARA
2. Hiện đại nhất
- Robot công nghiệp
Có rất nhiều loại robot, phụ thuộc vào cấu hình vật lý của chúng có thể được chia thành many-jointed (nhiều khớp), mobile (di động), zoomorphic (dạng động vật), android (người máy) và hybrid (hỗn hợp). Trong loại nhiều khớp (many-jointed) chúng ta có các robot công nghiệp giống như trong Hình 1 (Adept-SCARA robots).
Một robot công nghiệp có thể được xem như là một bộ các hệ con được ghép với nhau tương ứng một tay máy, một cánh tay cơ học, một khâu tác động cuối, các thành phần motor hoặc thiết bị truyền động, các cảm biến thông tin và các bộ điều khiển.
Tay máy SCARA có các đặc điểm cần thiết để thực hiện một công việc ổn định với độ chính xác và tốc độ. Vì lý do này, chúng được sử dụng rộng rãi trong các nhiệm vụ lắp ráp công nghiệp. Các ứng dụng khác đã được phát triển cho các robot này, ví dụ Wang et al. (2014) thiết kế một hệ thống điều khiển cho các robot này với 2 CPU, để phân tích động học ngược và động lực học ngược được thực hiện dựa trên Robotics Object Oriented Package trong C++ (ROBOOP). Hơn nữa, Surapong và Mitsantisuk (2016) sử dụng một robot SCARA để thực hiện một bộ quan sát nhiễu (DOB-Disturbance observer) thay cho một cảm biến lực để điều khiển vị trí và tước tính ngoại lực. Mặt khác, trong Jo and Cheol (2001), một bộ điều khiển chế độ trượt thích nghi được thiết kế để cải thiện các đặc tính trong hoạt động nhanh cũng như hiệu quả thay thế của loại điều khiển này. Thuật toán này được thực thi trong một robot SCARA bằng một bộ xử lý tín hiệu số (DSP). Cũng như vậy, Prajumkhaiy and Mitsantisuk (2016) trình bày một phương pháp để bù ma sát trong tay máy SCARA để giảm nhiệt lượng sinh ra, do đó việc bảo vệ hư hỏng robot trong quá trình vận hành giúp tăng chu kì làm việc.
Cuối cùng, Bruzzone and Bozzini (2011) dẫn một nghiên cứu với mục đích nhằm nâng cao hiệu quả sử dụng năng lượng trong loại tay máy robot này.
3. Điều khiển robot
Điều khiển robot có mục đích gửi tín hiệu điều khiển tới các khớp để làm cho robot đi theo một hành trình đã được xác định. Một số thuật toán điều khiển với các đặc điểm và độ phức tạp khác nhau đã được phát triển. Một số chiến dịch điều khiển khớp trong tay máy robot được tiến hành dưới sơ đồ vòng lặp khép kín được liệt kê sau đây: Decoupled Joint Control (điều khiển khớp riêng), Computed Torque (tính toán momen xoắn), Adaptive Control (điều khiển thích nghi), Gain Scheduling or Gain Planning, Adaptive Computing Controller by Reference Model (bộ điều khiển tính tóan thích nghi bằng mô hình tham khảo), Adaptive Computing Pair Controller (bộ điều khiển cặp tính toán thích nghi), Force Control (điều khiển lực), Robust Control, Control with Learning (điều khiển với việc học)… Ngoài các chiến lược điều khiển được liệt kê, một chiến lược điều khiển được sử dụng trong bài này phù hợp với Decoupled Control, vì chúng ta chỉ nhằm mục đích xác thực chức năng chính xác của robot mới được thiết kế và thực hiện này. Công cụ điều khiển này là khác đơn giản để thực hiện, vì nó không tính đến các nhiễu được tạo ra giữa các khớp của robot, mỗi khớp được điều khiển bằng một cách độc lập thông thường bằng bộ điều khiển PID cho mỗi khớp. Bộ điều khiển PID về bản chất cố gắng sửa chữa các nhiễu loạn sinh ra lỗi, loại bỏ lỗi (Siqueira et al., 2011; Urrea & Kern, 2014). Bộ điều khiển này tạo ra một tín hiệu điều khiển để phù hợp với tổng của ba khối: khối P tỉ lệ với sai lệch, khối I tỉ lệ với tích phân các sai lệch và khối P tỉ lệ với đạo hàm của các sai lệch. Phương trình sau mô tả bộ điều khiển dạng này:
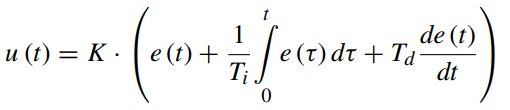
Với e = ys p – y, trong đó u là tín hiệu điều khiển, e là sai lệch điều khiển, ys p là điểm khởi tạo, và y là giá trị thực đo được của quá trình điều khiển. Các thông số điều khiển là các khối tỉ lệ K, bộ tích phân theo thời gian Ti và bộ đạo hàm theo thời gian Td.
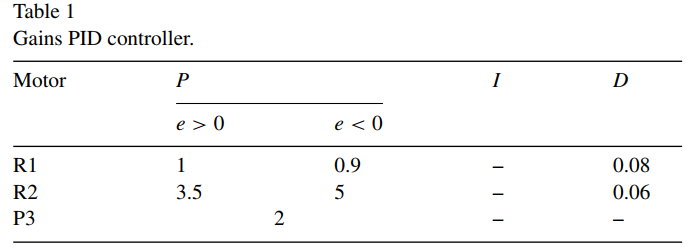
Các thông số được thể hiện trong bảng 1 là giá trị thông số của bộ điều khiển được sử dụng trong tay máy SCARA.
Sản phẩm được quan tâm
Nhận bài viết mới
Các bài viết chia sẻ đến cộng đồng rất chât lượng, mang lại rất nhiều kiến thức mới. Đừng bỏ lỡ bất kỳ bài viết nào của chung tối, hãy đăng ký để nhận bài viết mới qua Mail của bạn
Đăng ký để không bỏ lỡ bài viết nào!
Bài mới
- Giáo trình Robocon
- Giới thiệu các loại board Esp8266 dành cho IoT và thiết lập cơ bản cho người mới học
- Hướng dẫn sử dụng LoraEasyV1
- Tài liệu tự học Python tiếng Việt cho người mới bắt đầu
- Tương lai của kết nối IoT (Internet of Things) tiềm năng và sự đa dạng
- HƯỚNG DẪN LẤP RÁP XE MÔ HÌNH 4 BÁNH
- HƯỚNG DẪN LẮP RÁP XE CHẠY BẰNG NĂNG LƯỢNG MẶT TRỜI
Danh mục